














PLC Siemens S7-1200 nhỏ gọn có nhiều ứng dụng trên thị trường hiện tại. Là một PLC thường được sử dụng cùng với các bộ biến tần SINAMICS G120, việc sử dụng giao thức truyền thông USS đã được sử dụng rộng rãi trên thị trường. Bài viết này sẽ tập trung vào cách sử dụng giao thức truyền thông USS để giao tiếp với bộ biến tần S7-1200 và G120.
1. Nguyên lý hệ thống điều khiển và sơ đồ đấu dây
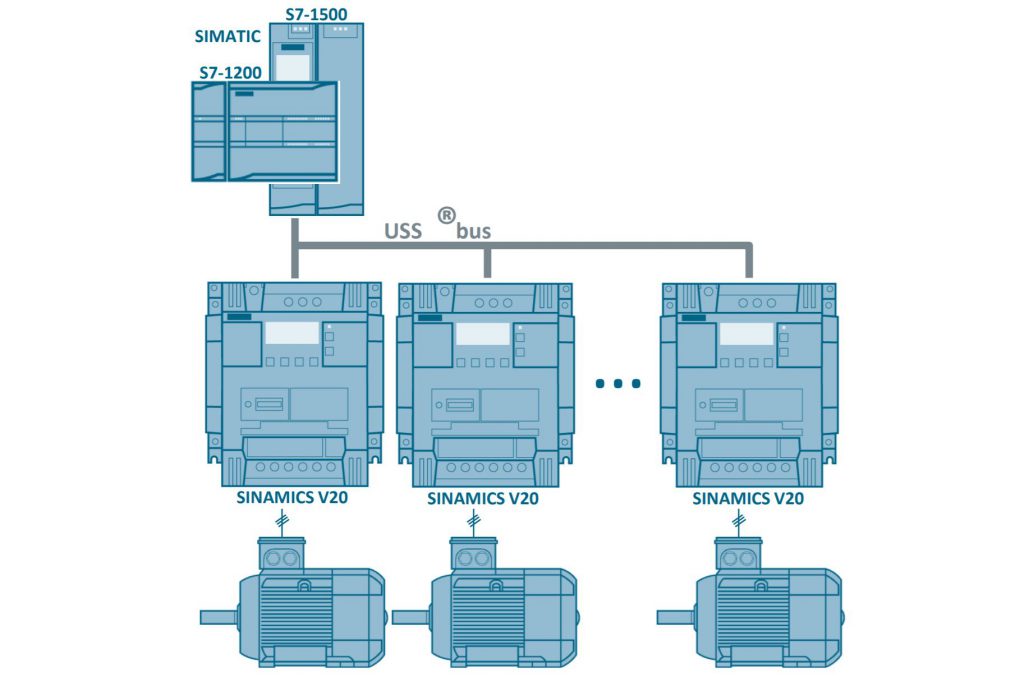
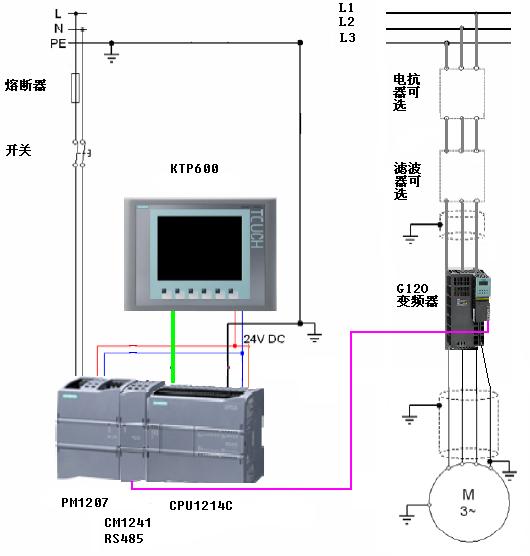
Hình bên dưới cho thấy nguyên lý và sơ đồ đấu dây được sử dụng trong ví dụ này.
2. Yêu cầu phần cứng
PLC S7-1200 hiện có ba loại CPU:
1) S7-1211C CPU。
2) S7-1212C CPU。
3) S7-1214C CPU。
Cả ba loại CPU đều có thể giao tiếp với biến tần G7-1 thông qua mô-đun truyền thông CM1241 RS485 sử dụng giao thức truyền thông USS.
Phần cứng PLC được sử dụng trong ví dụ này là:
1) Nguồn điện PM1207 (6EP1 332-1SH71)
2) S7-1214C (6ES7 214 -1BE30 -0XB0)
3) CM1241 RS485 (6ES7 241 -1CH30 -0XB0)
4) Bộ mô phỏng (6ES7 274 -1XH30 -0XA0)
Phần cứng biến tần G120 được sử dụng trong ví dụ này là:
1) SINAMICS G120 PM240 (6SL3244-0BA20-1BA0)
2) SINAMICS G120 CU240S (6SL3224-0BE13-7UA0)
3) SIEMENS MOTOR (1LA7060-4AB10)
4) Bảng điều khiển (XAU221- 001469)
5) Cáp thông tin liên lạc USS (6XV1830-0EH10)
3. Yêu cầu phần mềm
Phần mềm lập trình STEP 7 (6ES7 822-0AA0-0YA0)
Cấu hình
Chúng tôi hướng dẫn cách cấu hình giao tiếp USS của các ổ đĩa S7-1214C và G120 trong STEP 7 với hoạt động thực tế được mô tả bên dưới.
Cấu hình phần cứng PLC
Đầu tiên, hãy tạo một dự án trong Step 7

Trong cấu hình phần cứng, thêm CPU1214C và mô-đun giao tiếp CM1241 RS485, như được hiển thị trong Hình 2.

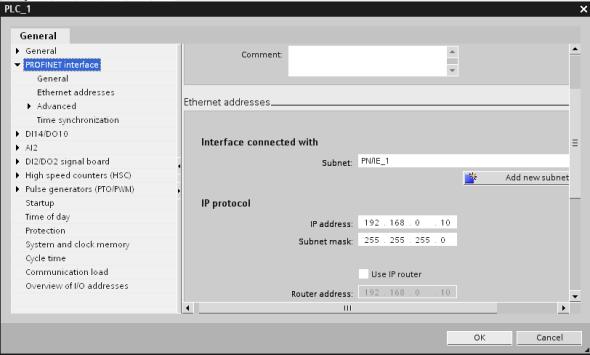
Trong các thuộc tính của CPU, đặt địa chỉ IP của Ethernet và thiết lập kết nối giữa PG và PLC, như thể hiện trong hình bên dưới.
4. Cài đặt thông số 2 G120
Các thông số cài đặt của biến tần được trình bày trong bảng dưới đây.
Bảng 1: Cài đặt thông số của biến tần G120
| STT | Đặc trưng | Tham số | Đặt giá trị |
| 1 | Đặt lại cài đặt gốc | P0010 | 30 |
| 2 | Đặt lại cài đặt gốc | P970 | 1 |
| 3 | Cài đặt bắt đầu nhanh | P0010 | 1 |
| 4 | Điện áp định mức động cơ | P0304 | 380V |
| 5 | Công suất định mức động cơ | P0307 | 5,5KW |
| 6 | Tần số định mức động cơ | P0310 | 50Hz |
| 7 | Tốc độ định mức động cơ | P0311 | 1350r / phút |
| số 8 | Nguồn lệnh USS | P0700 | 5 |
| 9 | Nguồn cài đặt tần số | P01000 | 5 |
| 10 | Tần số động cơ tối thiểu | P1080 | 0,0Hz |
| 11 | Tần số động cơ tối đa | P1081 | 50.0Hz |
| 12 | Thời gian bắt đầu đoạn đường nối | P1120 | 10.0S |
| 13 | Thời gian trễ của đoạn đường nối | P1121 | 10.0S |
| 14 | Kết thúc thiết lập bắt đầu nhanh | P3900 | 1 |
| 15 | Kích hoạt chế độ chuyên gia | P0003 | 3 |
| 16 | Tần suất tham chiếu | P2000 | 50.0Hz |
| 17 | Tốc độ truyền dữ liệu USS | P2010 | 9 |
| 18 | Địa chỉ nô lệ USS | P2011 | 1 |
| 19 | Chiều dài USS PZD | P2012 | 2 |
| 20 | Chiều dài USS PKW | P2013 | 4 |
| 21 | Giám sát giao tiếp | P2014 | 0 |
| 22 | Lưu dữ liệu trong E2PROM | P0971 | 1 |
| 23 | Kích hoạt chế độ chuyên gia | P0003 | 3 |
| 24 | Kích hoạt chế độ tham số | P0010 | 30 |
| 25 | Chuyển các tham số từ G120 sang BOP | P0802 | 1 |
Lưu ý: Bốn giá trị tham số 17, 18, 19, 20 trong Bảng 1 phải được đặt sao cho giá trị tham số của PLC phù hợp với giá trị tham số của biến tần. Giá trị của hai tham số 19 và 20 phải được đặt thành giá trị trong Bảng 1. Nếu không, biến tần có thể giao tiếp với S7-1200 với các vấn đề sau: Các giá trị thông số trả về từ biến tần có thể không được đọc ra.
5. Nguyên tắc giao tiếp USS và thực hiện lập trình
5.1 Nguyên lý cơ bản của S7 1200 PLC và G120 Giao tiếp qua USS
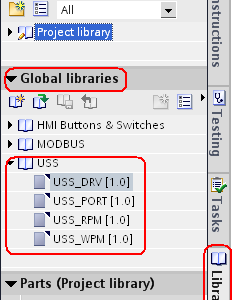
S7 1200 cung cấp một thư viện USS dành riêng cho giao tiếp USS, như thể hiện trong hình sau:
Khối chức năng USS_DRV là khối chức năng chính của giao tiếp S7-1200 USS. Các thông tin của biến tần và các lệnh điều khiển biến tần đều do chức năng này hoàn thành. Phải được gọi trong OB chính và không được gọi trong OB ngắt tuần hoàn.
Khối chức năng USS_PORT là giao diện giữa S7-1200 và USS của biến tần, và chủ yếu thiết lập các tham số giao diện của giao tiếp. Có thể được gọi trong OB chính hoặc OB ngắt.
Khối chức năng USS_RPM đọc các thông số của biến tần thông qua giao tiếp USS. Phải được gọi trong OB chính và không được gọi trong OB ngắt tuần hoàn.
Khối chức năng USS_WPM là một tham số để cài đặt biến tần thông qua giao tiếp USS. Phải được gọi trong OB chính và không được gọi trong OB ngắt tuần hoàn.
Mối quan hệ điều khiển giữa các khối chức năng chuyên dụng này và biến tần được trình bày dưới đây:
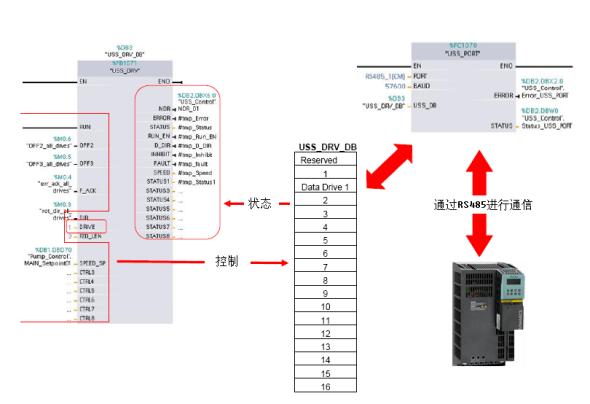
Khối chức năng USS_DRV nhận và truyền dữ liệu với khối chức năng USS_PORT thông qua khối dữ liệu USS_DRV_DB và khối chức năng USS_PORT là giao diện truyền thông giữa mô-đun S7-1200 PLC CM1241 RS485 và biến tần. Giao tiếp giữa khối chức năng USS_RPM và khối chức năng USS_WPM và bộ biến tần giống như giao tiếp của khối chức năng USS_DRV.
Mỗi CPU S7-1200 có thể có tối đa 3 mô-đun giao tiếp và mỗi mô-đun giao tiếp CM1241 RS485 hỗ trợ tối đa 16 biến tần. Do đó, người dùng có thể thiết lập tối đa ba mạng USS trong một CPU S7-1200 và mỗi mạng USS hỗ trợ tối đa 16 bộ biến tần, với tổng số lên đến 48 bộ biến tần USS.
5.2 PLC S7 1200 để lập trình truyền thông USS
1. Lập trình khối chức năng tham số giao diện truyền thông USS
Việc lập trình khối chức năng tham số giao diện truyền thông USS được trình bày trong hình bên dưới.
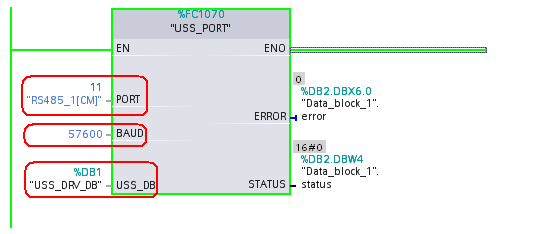
Khối chức năng USS_PORT được sử dụng để xử lý thông tin liên lạc trên mạng USS. Nó là giao diện giao tiếp giữa CPU S71200 và biến tần. Mỗi mô-đun CM1241 RS485 có và phải có một khối chức năng USS_PORT.
PORT: Đề cập đến mô-đun giao tiếp nào thực hiện giao tiếp USS.
BAUD: Đề cập đến tốc độ mà ổ đĩa đang đi. Tham số P2010 của biến tần được đặt.
USS_DB: Đề cập đến khối dữ liệu USS khi giao tiếp với ổ đĩa. Mỗi mô-đun giao tiếp có thể có tối đa 16 khối dữ liệu USS và mỗi CPU có thể có tối đa 48 khối dữ liệu USS. Tình huống giao tiếp cụ thể cần liên quan đến tình hình thực tế tại công trường. Khối dữ liệu mà mỗi ổ giao tiếp với S7-1200 là duy nhất.
ERROR: Lỗi đầu ra.
TRẠNG THÁI: Trạng thái của quá trình quét hoặc khởi tạo.
Giao tiếp giữa PLC S7-1200 và biến tần không được đồng bộ hóa với chu kỳ quét của chính nó. S7-1200 thường hoàn thành nhiều lần quét trước khi hoàn thành một sự kiện giao tiếp với biến tần.
Khoảng thời gian của giao tiếp USS_PORT là thời gian cần thiết để S7-1200 giao tiếp với biến tần và các tốc độ truyền thông tin khác nhau tương ứng với các khoảng thời gian giao tiếp USS_PORT khác nhau. Hình bên dưới cho thấy khoảng thời gian giao tiếp tối thiểu USS_PORT đối với các tốc độ truyền khác nhau.
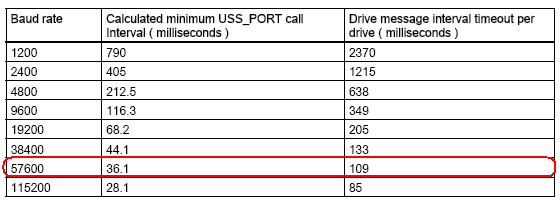
USS_PORT thường thực hiện 3 lần thử để hoàn thành sự kiện giao tiếp khi xảy ra lỗi giao tiếp. Thời gian S7-1200 giao tiếp với biến tần là khoảng thời gian mà USS_PORT có thời gian chờ liên lạc. Ví dụ: nếu tốc độ truyền thông là 57600, thì khoảng thời gian để USS_PORT giao tiếp với biến tần phải lớn hơn khoảng thời gian cuộc gọi tối thiểu, lớn hơn 36,1Ms và nhỏ hơn 109Ms. Cố gắng hết thời gian chờ lỗi giao tiếp mặc định cho thư viện giao thức S7-1200 USS là 2 lần.
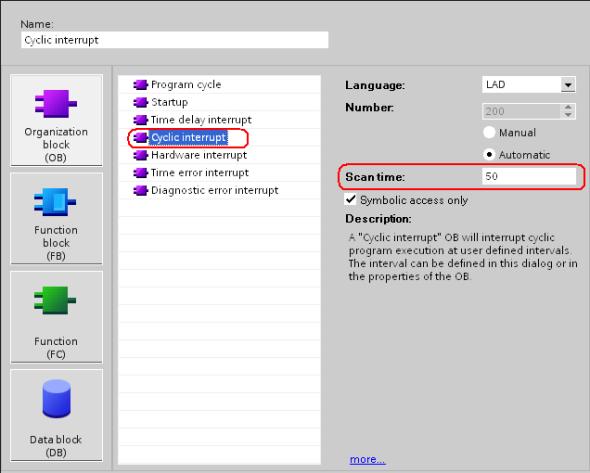
Dựa trên quá trình xử lý thời gian giao tiếp USS_PORT ở trên, chúng tôi đề xuất gọi khối chức năng giao tiếp USS_PORT trong khối OB ngắt tuần hoàn. Khi thiết lập khối OB ngắt tuần hoàn, chúng ta có thể thiết lập thời gian quét của khối OB ngắt tuần hoàn để đáp ứng yêu cầu truyền thông. Cài đặt thời gian quét của khối OB ngắt tuần hoàn như sau:
2. Lập trình khối chức năng USS_DRV
Việc lập trình khối chức năng USS_DRV được trình bày dưới đây.
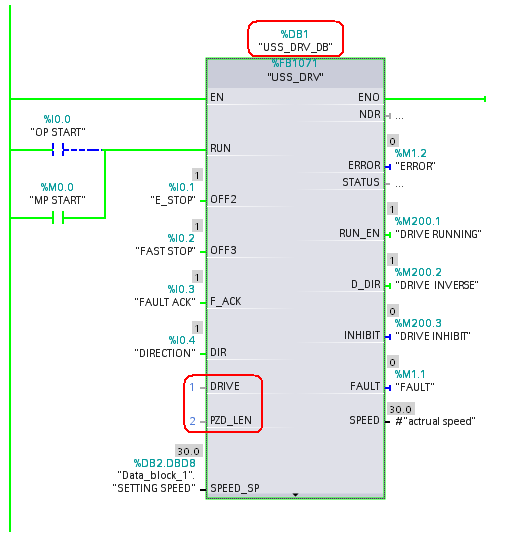
Khối chức năng USS_DRV dùng để trao đổi dữ liệu với bộ biến tần để đọc trạng thái của bộ biến tần và điều khiển hoạt động của bộ biến tần. Mỗi ổ đĩa sử dụng một khối chức năng USS_DRV duy nhất, nhưng tất cả các ổ đĩa (tối đa 16) của mạng USS của cùng một mô-đun CM1241 RS485 sử dụng cùng một USS_DRV_DB.
USS_DRV_DB: Chỉ định khối dữ liệu cho ổ đĩa để thực hiện giao tiếp USS.
RUN: Chỉ định lệnh khởi động biến tần cho khối DB.
OFF2: Dừng khẩn cấp, đỗ xe miễn phí. Bit này là 0 khi đỗ xe.
OFF3: Dừng xe nhanh với phanh đỗ xe. Bit này là 0 khi đỗ xe.
F_ACK: Xác nhận lỗi ổ đĩa.
DIR: Bộ biến tần điều khiển động cơ.
SPEED_SP: Điểm đặt tốc độ của biến tần.
LỖI: Kết quả chương trình không chính xác.
RUN_EN: Chỉ báo trạng thái hoạt động của biến tần.
D_DIR: Chỉ báo trạng thái hướng chạy của biến tần.
INHIBIT: Cho biết ổ đĩa có bị vô hiệu hóa hay không.
FAULT: Ổ đĩa bị lỗi.
SPEED: Giá trị tốc độ thực tế của phản hồi từ biến tần.
DRIVE: Địa chỉ trạm USS của ổ đĩa. Thông số biến tần P2011 được đặt.
PZD_LEN: Từ xử lý tuần hoàn của biến tần. Thông số biến tần P2012 được đặt.
Lưu ý: Độ dài của PKW của biến tần được đặc biệt chú ý ở đây. Nó phải là 4 khi sử dụng liên lạc USS. Nếu nó được thay đổi thành 3 hoặc 127, giá trị quy trình phản hồi sẽ không được đọc.
3. Lập trình khối chức năng USS_RPM
Chương trình của khối chức năng USS_RPM được hiển thị bên dưới.
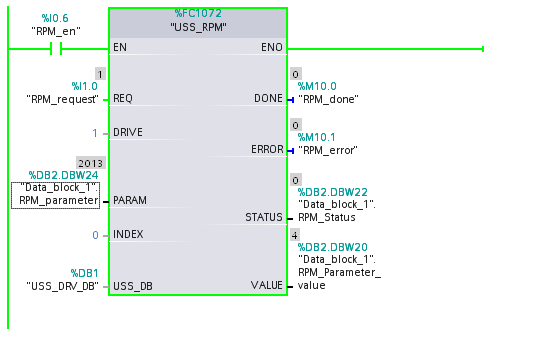
Khối chức năng USS_RPM được sử dụng để đọc các tham số từ bộ biến tần thông qua giao tiếp USS.
REQ: Đọc yêu cầu tham số.
DRIVE: Địa chỉ trạm USS của ổ đĩa.
PARAM: Mã thông số của biến tần.
INDEX: Mã chỉ số tham số của biến tần
USS_DB: Chỉ định khối dữ liệu để biến tần thực hiện giao tiếp USS.
XONG: Tham số đọc hoàn tất.
LỖI: Tham số đọc không chính xác.
TRẠNG THÁI: Đọc mã trạng thái tham số.
VALUE: Giá trị của thông số đang được đọc.
Lưu ý: Khi đọc lập trình khối hàm tham số, kiểu dữ liệu của mỗi dữ liệu phải được khớp chính xác. Nếu bạn cần đặt tham số đọc cho biến, lưu ý rằng giá trị ban đầu của biến tham số không được bằng 0, nếu không rất dễ xảy ra lỗi giao tiếp.
4. Lập trình khối chức năng USS_WPM
Chương trình của khối chức năng USS_WPM được hiển thị bên dưới.
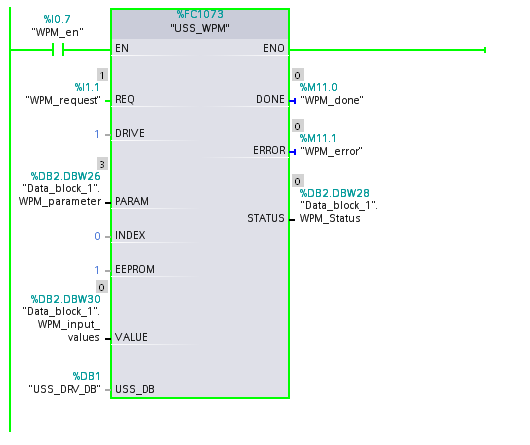
Khối chức năng USS_WPM được sử dụng để thiết lập các tham số của biến tần thông qua giao tiếp USS.
REQ: Đọc yêu cầu tham số.
DRIVE: Địa chỉ trạm USS của ổ đĩa.
PARAM: Mã thông số của biến tần.
INDEX: Mã chỉ số tham số của biến tần.
EEPROM: Lưu các thông số vào EEPROM của ổ đĩa.
VALUE: Đặt giá trị của tham số.
USS_DB: Chỉ định khối dữ liệu cho ổ đĩa để thực hiện giao tiếp USS.
XONG: Tham số đọc hoàn tất.
LỖI: Đọc trạng thái lỗi tham số.
TRẠNG THÁI: Đọc mã trạng thái tham số.
Lưu ý: Khi lập trình khối chức năng ghi tham số, kiểu dữ liệu của mỗi dữ liệu phải được khớp chính xác. Nếu bạn cần thiết lập một biến để ghi giá trị tham số, lưu ý rằng giá trị ban đầu của biến tham số không được bằng 0, nếu không rất dễ xảy ra lỗi giao tiếp.
5.3 PLC S7 1200 để gỡ lỗi giao tiếp USS
Khi PLC S7-1200 giao tiếp với biến tần thông qua mô-đun CM1241 RS485, cần lưu ý những điểm sau:
- Khi cùng một mô-đun CM1241 RS485 có nhiều (tối đa 16) bộ biến tần USS, USS_DB của giao tiếp giống nhau tại thời điểm này, khối chức năng USS_DRV được gọi nhiều lần và địa chỉ trạm USS tương ứng được gọi khi mỗi khối chức năng USS_DRV được gọi là. Nó phải phù hợp với biến tần thực tế và các thông số điều khiển khác phải phù hợp.
- Khi cùng một PLC S7-1200 có nhiều mô-đun CM1241 RS485 (tối đa 3), USS_DB để truyền thông tại thời điểm này tương ứng với 3 và mạng USS của mỗi mô-đun CM1241 RS485 sử dụng cùng USS_DB, các mạng USS khác nhau. Sử dụng USS_DB khác.
- Khi đọc và ghi các tham số của biến tần, hãy cẩn thận không thực hiện đồng thời các hoạt động của USS_RPM và USS_WPM, và chỉ có thể đọc hoặc ghi một tham số cùng một lúc và không thể đọc hoặc ghi nhiều tham số.