














_Công Ty Hệ Thống Điện và Tự Động Hóa Full Electric_
Điều khiển vị trí sử dụng module QD75D2
Full Electric đã giới thiệu về PLC FX điều khiển servo thông qua các ngõ phát xung. (link). Tuy nhiêu Fx yêu cầu tính toán chuẩn xác cao, hôm nay CT TNHH HTĐ & TĐH Full Electric xin giới thiệu module điều khiển vị trí QD75D2, một module rất mạnh trong điều khiển với độ chính xác lớn.
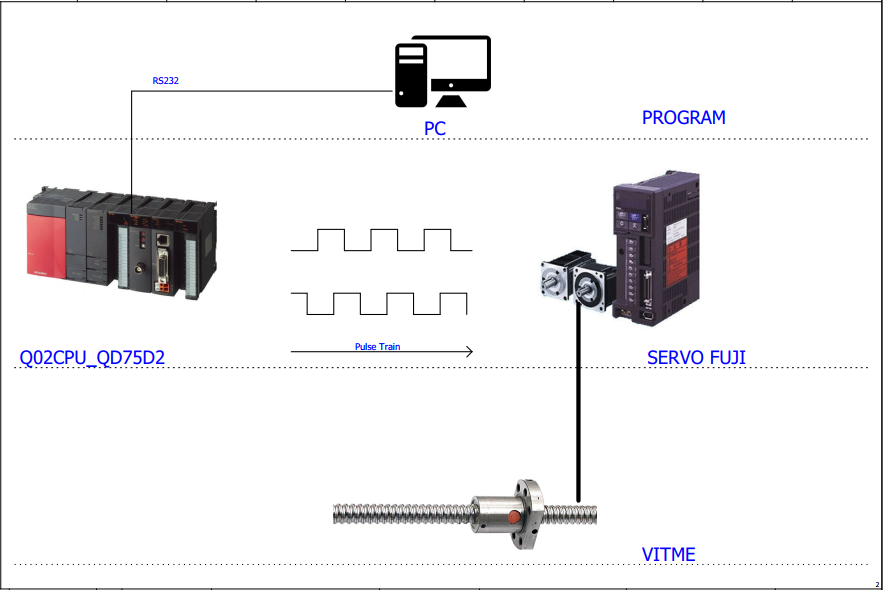
Hình 1: Sơ đồ tổng quan.
- QD75D2 là gì ?
QD75XX là dòng điều khiển phát xung dành cho các ứng dụng servo, module hỗ trỡ tính toán chính xác đến um. module này có thể có các loại kết nối 1 trục, 2 trục, 4 trục tùy theo yêu cầu sử dụng. QD75 có thể định được đỉa chỉ cho mỗi trục lên tới 600 điểm, trong quá trình vận hành, module sẽ tính toán chiều quay số xung để đáp ứng được yêu cầu bài toán đặt ra. Để có thể sử dụng module, các bạn liên hệ bộ phận bán hàng để được hướng dẫn.
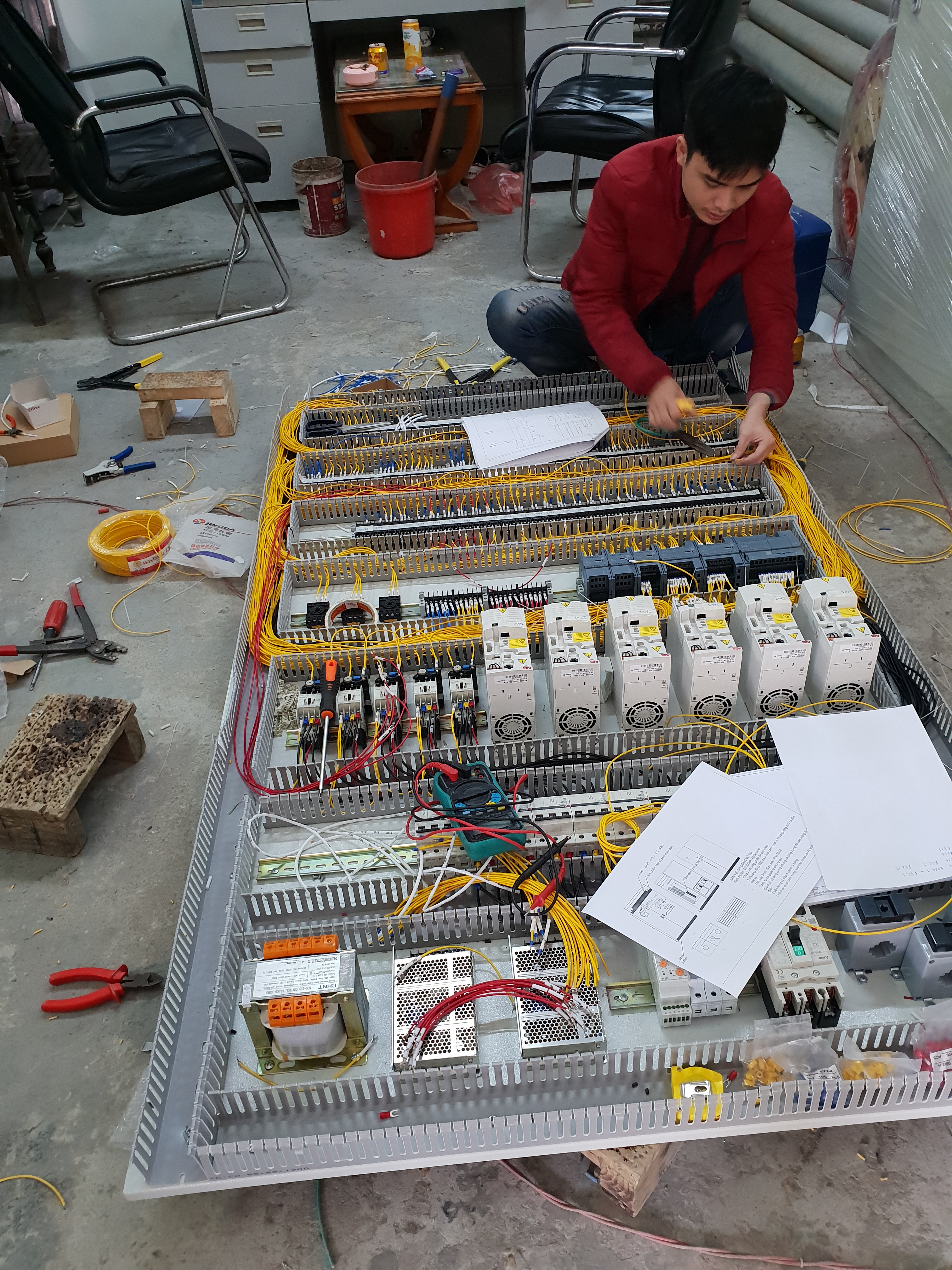
- Thiết bị:

Hình 2: CPU Q02 và các module (ModuleQd75 ngoài cùng).
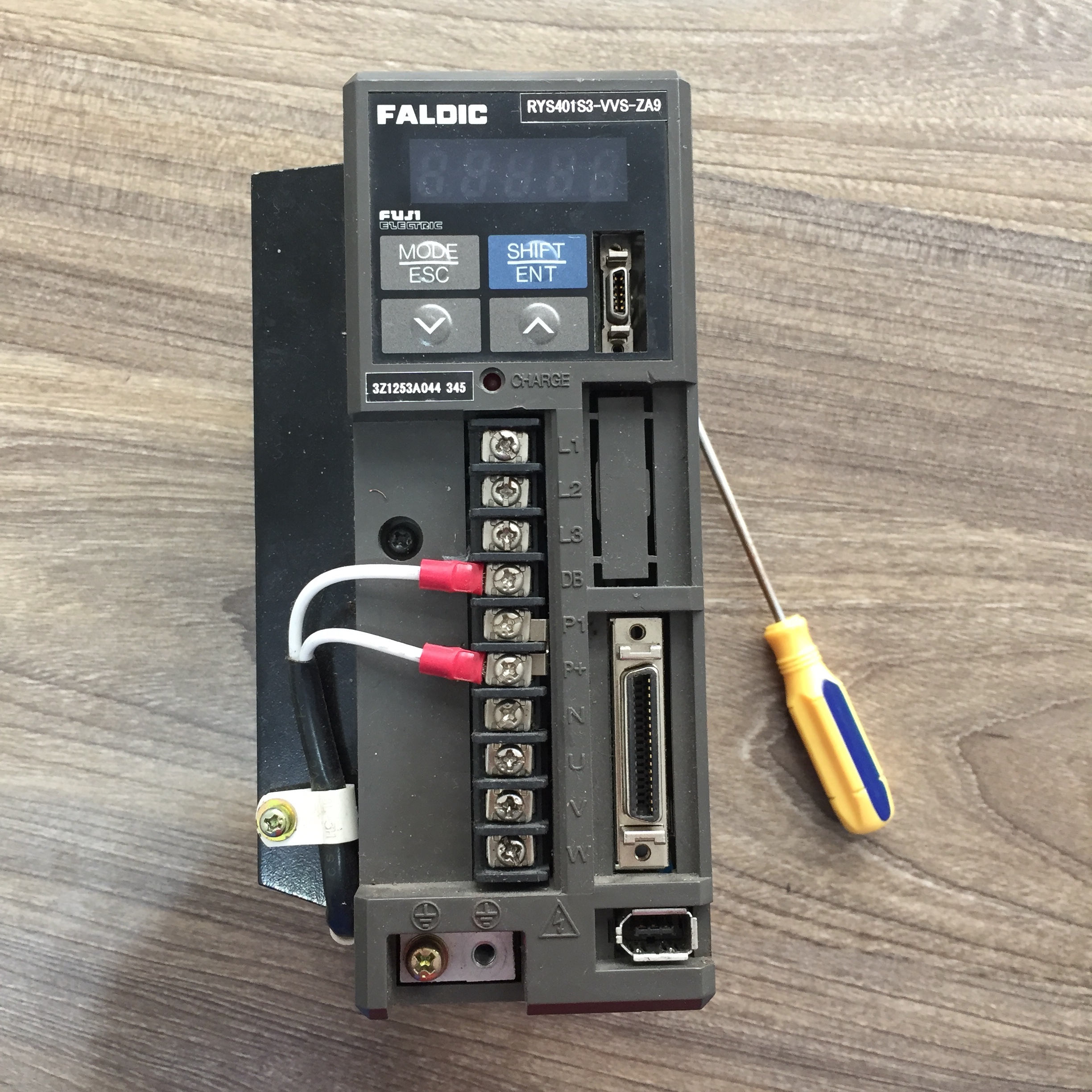 Hình 3: Servo Driver FuJi
Hình 3: Servo Driver FuJi
 Hình 4: Servo Motor FuJi
Hình 4: Servo Motor FuJi
Để cấu hình và lập trình ta sử dụng phần mềm GxWorks2 hoặc Gx Deverlop
- Đấu nối
Để có thể hiểu rõ về phần này ta có thể tham khảo ở bài viết PLC Fx điều khiển servo, cũng như cách cài đặt các thông số cho bộ Driver.
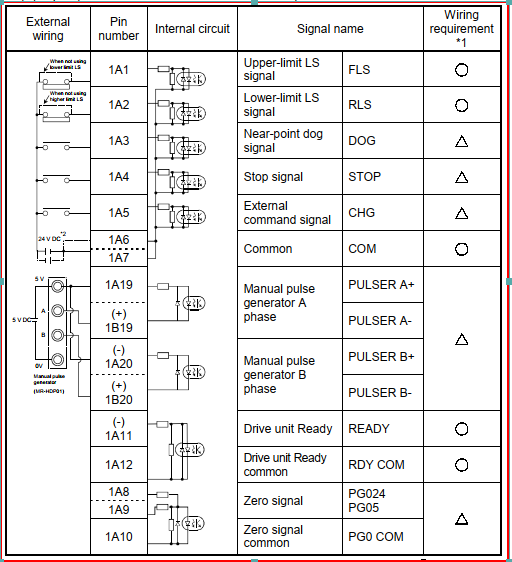
Hình 5: Input
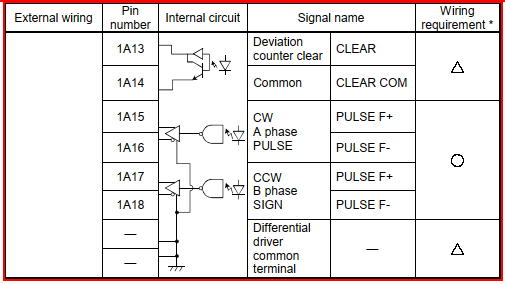
Hình 6 Output
- Lập trình
- Khởi tạo 1 Project, cấu hình phần cứng,cài đặt địa chỉ
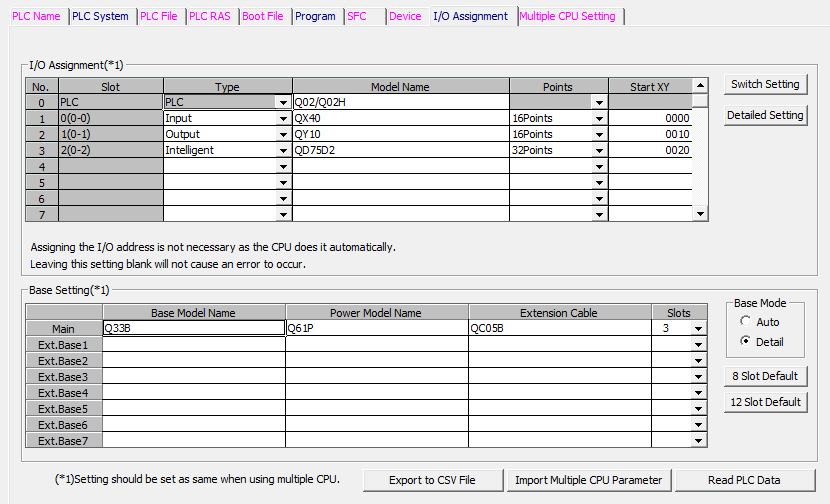
Hình 7: Cấu hình phần cứng.
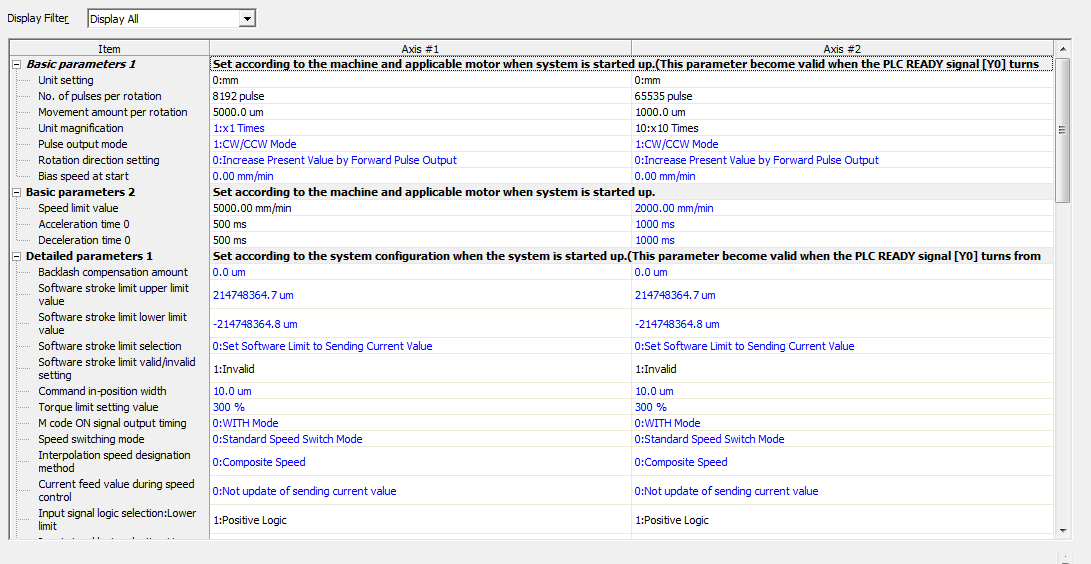 Hình 8: Cài đặt các thông số cơ bản.
Hình 8: Cài đặt các thông số cơ bản.
Phần cài đặt các thông số, yêu cầu nhập đúng, phần này sẽ được bộ điều khiển tính toán trong quá trình chuyển động.
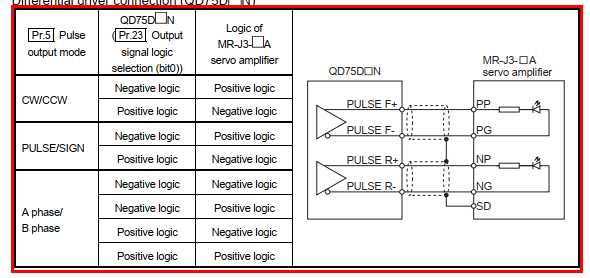
Ở đây có các thông số về giới hạn tốc tộ, chế độ xung, giới hạn bảo về trên dưới bằng phần mềm là nhưng lưu ý cần được xem tới. Để hiểu rõ phần này các bạn có thể tham khảo manual hoặc video.
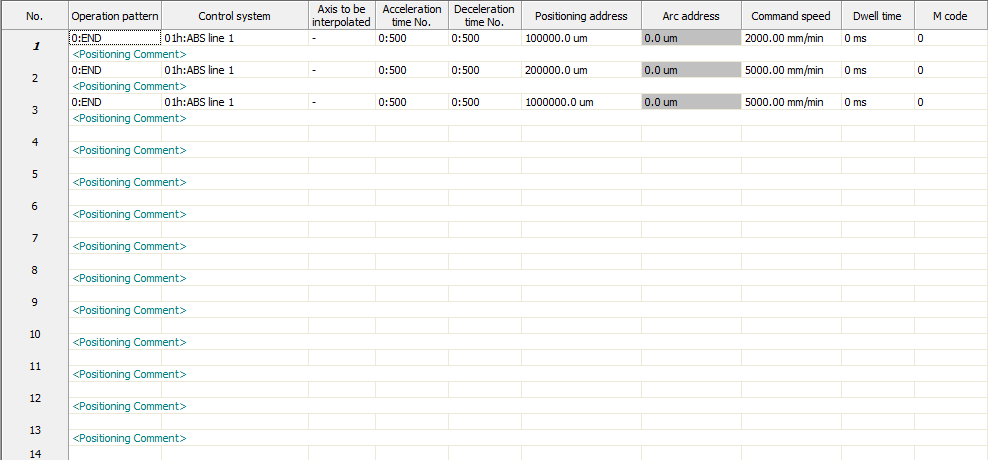 Hình 9: Thiết lập các vị trí.
Hình 9: Thiết lập các vị trí.
Thiết lập các vị trí mà servo sẽ chạy tới đó. Ở đây cần đặt chính xác vị trí và tốc độ thực hiện.
Tiến hành lập trình.
Để biết các thông số, trạng thái, địa chỉ chính xác các bạn mở theo dõi module mở rộng như sau :
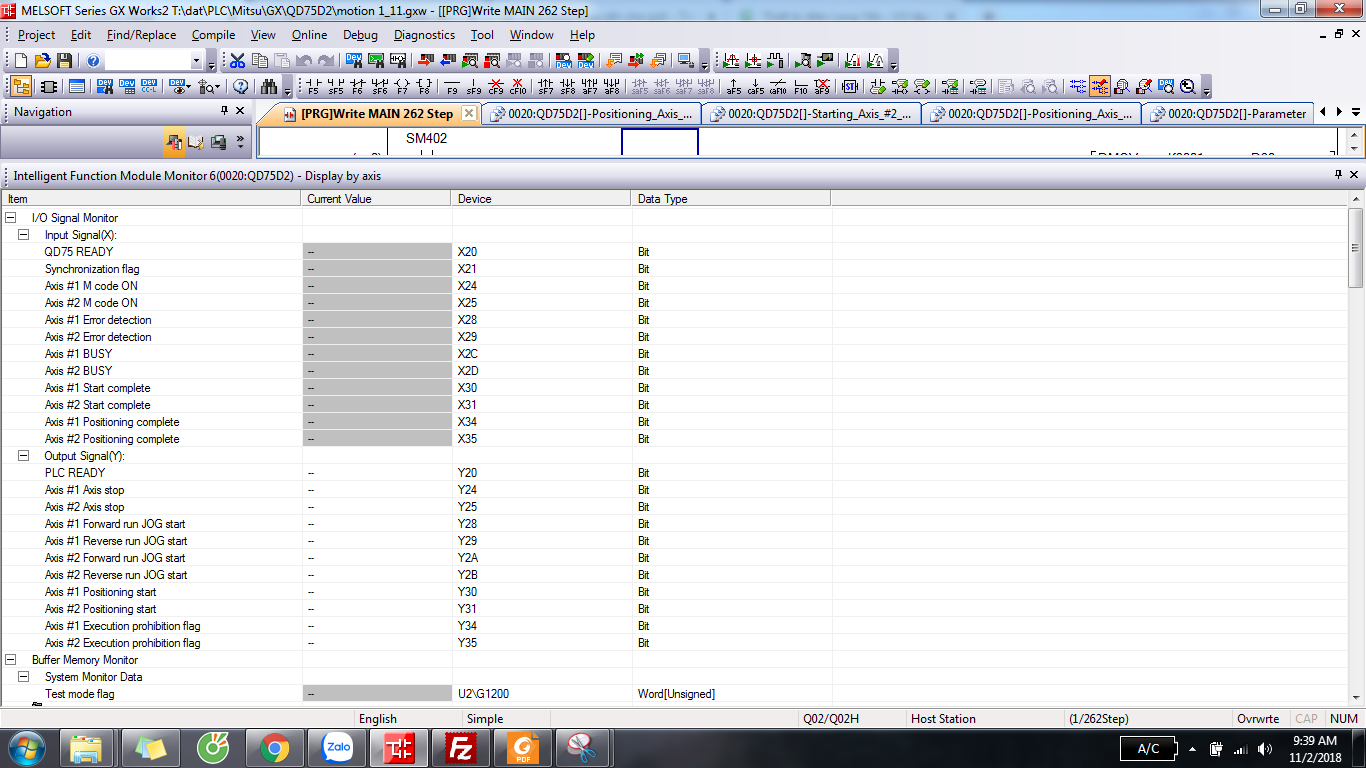 Với bảng trạng thái này ta có thể dễ dàng cấu hình cho phần mềm.
Với bảng trạng thái này ta có thể dễ dàng cấu hình cho phần mềm.
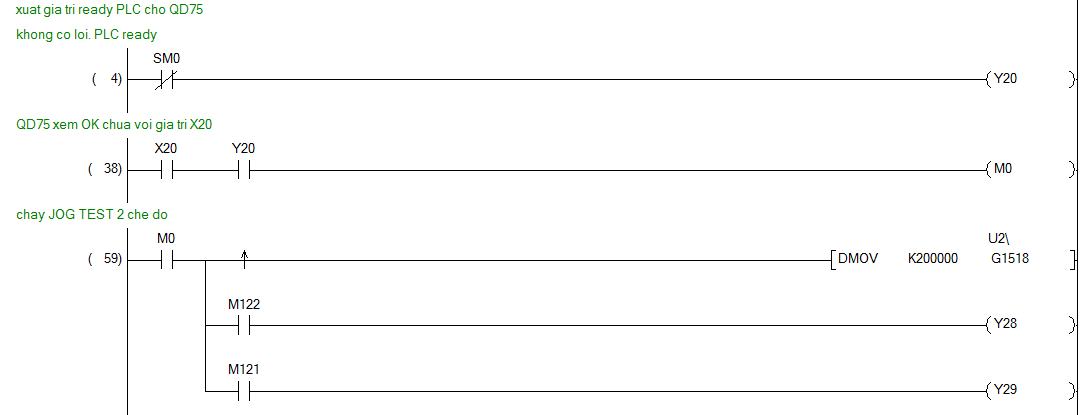 Hình : Để kiểm tra đấu dây, các bạn có thể chạy ở chế độ test jog. với Y28 Y29 là chạu thuận ngược. U2\G1518 là tốc độ chạy JOG muốn đặt. Ở đâu Full Electric xin lấy giá trị 200000 um/min. Sau khi Servo chạy thành công ta tiến hành sang chế độ vận hành vị trí.
Hình : Để kiểm tra đấu dây, các bạn có thể chạy ở chế độ test jog. với Y28 Y29 là chạu thuận ngược. U2\G1518 là tốc độ chạy JOG muốn đặt. Ở đâu Full Electric xin lấy giá trị 200000 um/min. Sau khi Servo chạy thành công ta tiến hành sang chế độ vận hành vị trí.
 Hình : RUN
Hình : RUN
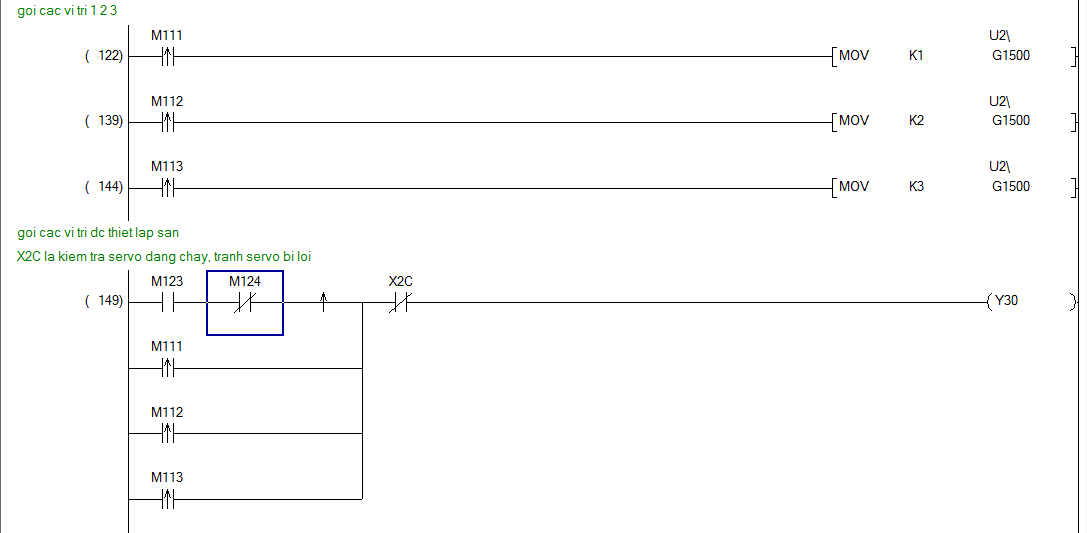
Y30 là địa chỉ đầy ra CPU xuất cho Module QD75 để nó hiểu chạy ở trạng thái vận hành. U2\G1500 là ô nhớ để lấy giá trị vị đã được cấu hình sẵn ở parameter. Ở đây ta lấy 3 vị trí, các bạn có thể lấy lên tới 600 vị trí ở trong dải limit đã cấu hình.
Lưu ý X2C là trạng thái báo BUSY trục 1, nên làm điều kiện chéo để tránh Module sẽ báo lỗi. Nếu lỗi sảy ra, cần reset.
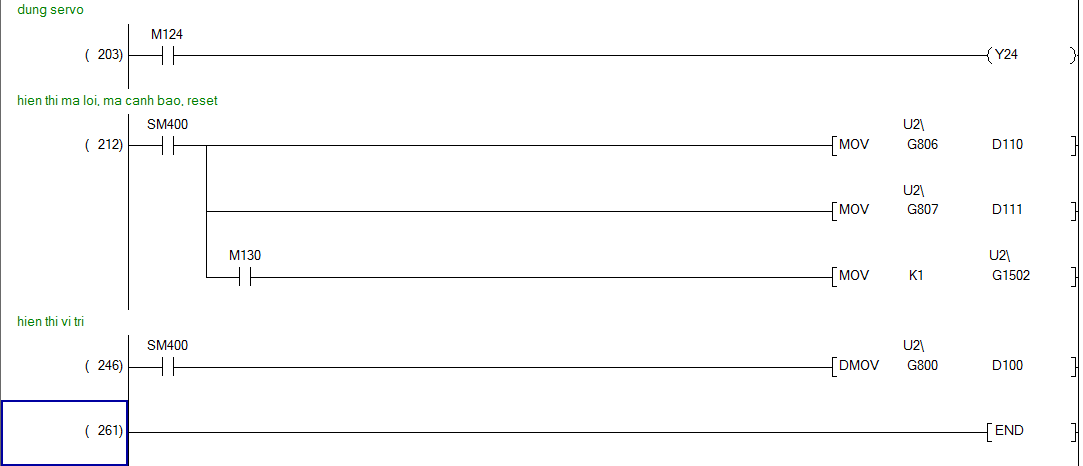 Ta có Y24 là trạng thái dừng phát xung, khi có tín hiệu này, động cơ servo sẽ ngừng quay. U2\G1502 là ô nhớ, khi được lưu là 1 các lỗi hay cảnh báo sẽ được reset ngay lập tức.
Ta có Y24 là trạng thái dừng phát xung, khi có tín hiệu này, động cơ servo sẽ ngừng quay. U2\G1502 là ô nhớ, khi được lưu là 1 các lỗi hay cảnh báo sẽ được reset ngay lập tức.
Ngoài ra còn có các thông số về cị trí tốc độ, các bạn có thể theo dõi manual hoặc bảng thông số Monitor để lập trình hiển thị trên HMI.
Đến đây Full Electrc đã giới thiệu xong cơ bản cách sử dụng module vị trí QD75D2.
- Test
Để theo dõi test các bạn có thể xem video (link) hoặc liên hệ kĩ thuật và bán hàng bên FullElectric
Mọi thắc mắc liên hệ kĩ thuật để được giải đáp.
---------------------------------------------------------------------------------------
---------------------------------------------------------------------------------------