














_Công Ty Hệ Thống Điện và Tự Động Hóa Full Electric_
PLC Mitsubishi Fx điều khiển servo
Motion Control là 1 phần khá phổ biến, hệ thống điều khiển vị trí chính xác sử dụng Servo được áp dụng rộng rãi.
Servo Motor và Servo Driver được sử dụng điều khiển vị trí, tuy nhiên nó vẫn còn các ứng dụng cơ bản khác :
- Điều khiển vị trí
- Điều khiển tốc độ
- Điều khiển lực căng
Ở đây Full Electrc xin được giới thiể và sử dụng bộ điều khiển PLC Fx 1S 30MT, bộ Servo MR-J2S-10A
Trong bài tiếp theo FullE sẽ gửi tới phần điều khiển servo bằng PLC Siemens. (Link)
Để có thể điều khiển ta chon loại PLC đầu ra ngõ Transistor, có chân xung tốc độ cao. Fx1S có 2 chân tốc độ cao Y000 và Y0001.
- Thiết bị sử dụng

Hình 1: PLC Fx 1s 30MT

Hình 2: Bộ Servo.
- Sơ đồ đấu nối
Vì PLC hạn chế số lượng ngõ ra xung tốc độ cao nên ta sử dụng chế độ phát xung đơn với 1 chân điều hướng riêng biệt ( có thể tham khảo cách cài đặt thông số ở các bài tiếp theo Link).
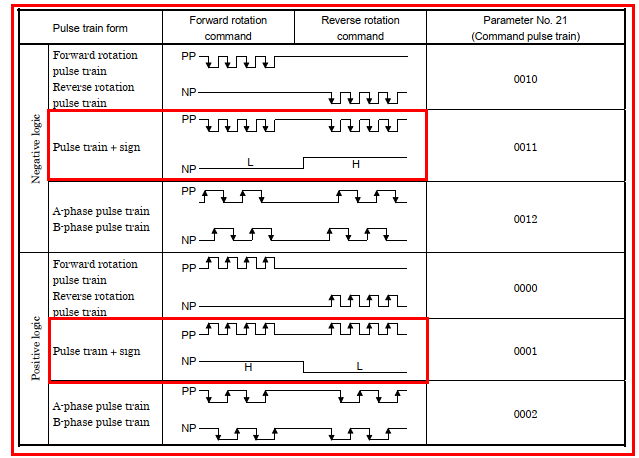
Hình 3: Chế độ phát xung.
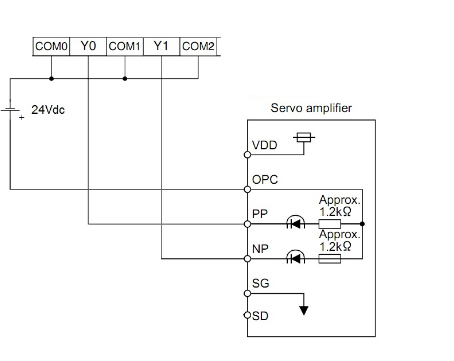
Hình 4: Sơ đồ chân phát xung.
Sau khi kết nối phần cứng, đảm bảo các chân an toàn, các thông số mong muốn ta tiến hành lập trình.
- Các lệnh cơ bản
- PLSY lệnh phát xung tốc độ cao với đầu ra xung vuông
- PLSR lệnh phát xung với đầu ra là xung có thời gian tăng giảm tốc
- DRVI phát xung kèm theo đảo chiều
- DRVA phát xung với giá trị zero tuyệt đối
Với các thông số lớn ta chỉ cần thêm chữ D để chọn chế độ 32bit.
- Lập trình Fx1s trên phần mềm GX Work2
Bộ Servo có độ phân giải encoder là 131 072 xung/vòng, vì vậy để quay 1 vòng ta cần phát ra tần số với số xung 131 072 để đạt được 1 vòng quay. Cần phát tần số và số xung để encoder quay nhanh- chậm cũng như đạt được số vòng mong muốn.
Sử dụng GX_Works2 và chọn PLC
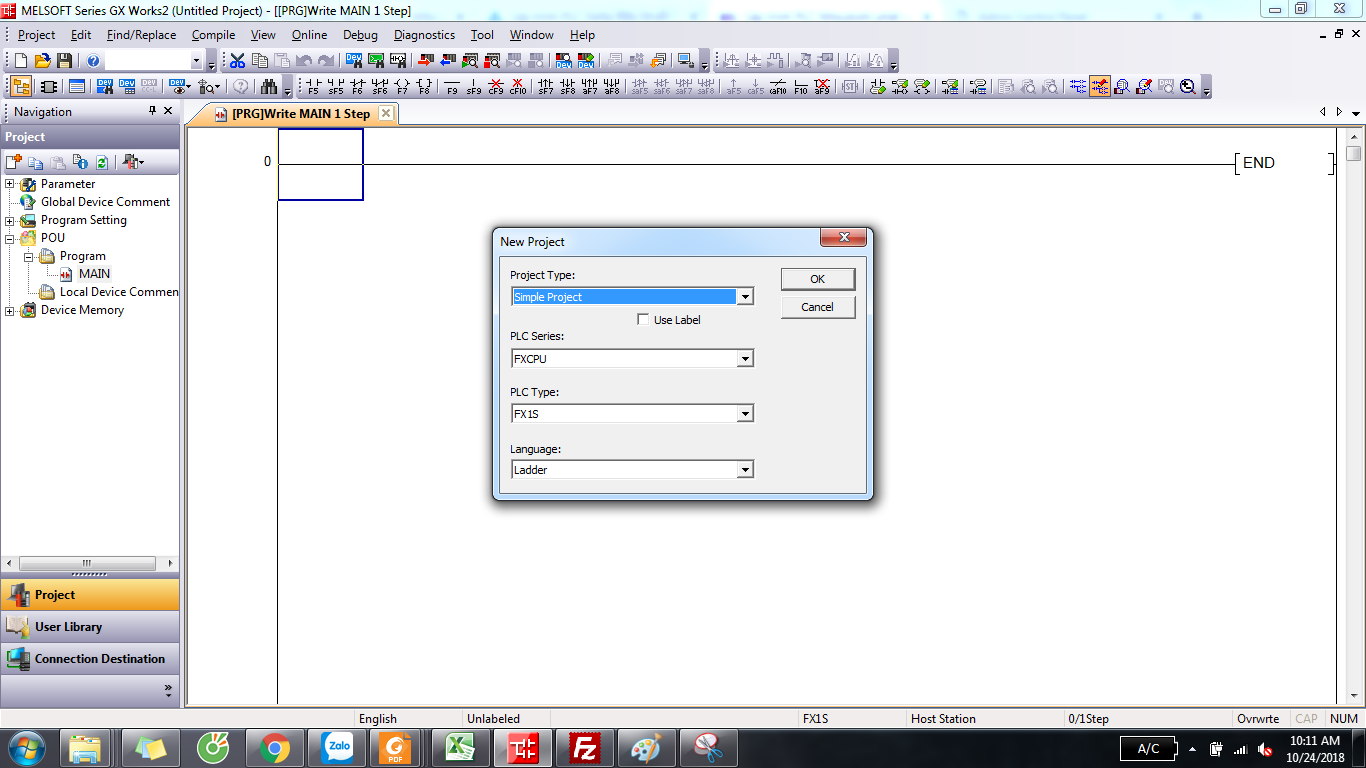
Hình 5 : Tạo Project
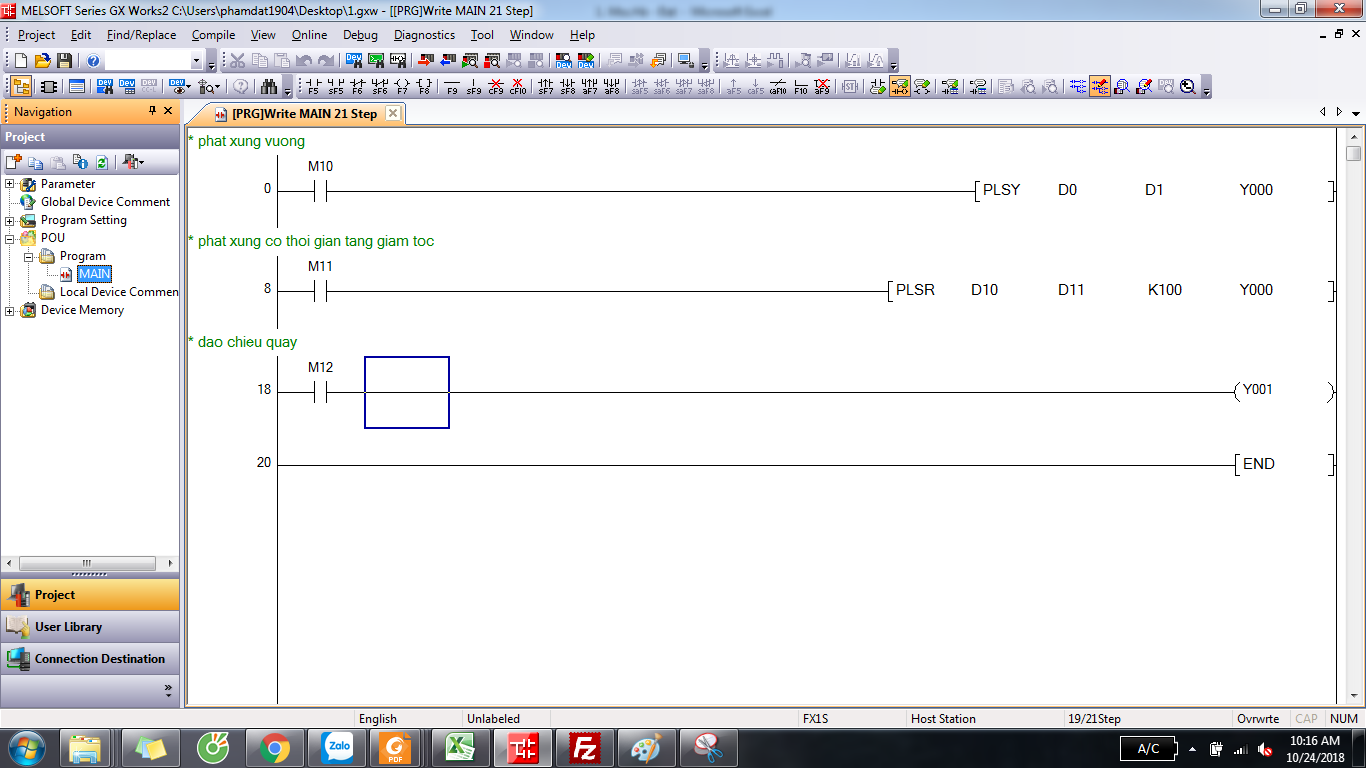 Hình 5 : Lập trình phát xung.
Hình 5 : Lập trình phát xung.
Ta tiến hành thử nghiệm.
- Giải thích lệnh
1_ PLSY DO D1 Y000
D0 là tấn số xung, điều này quyết định nhanh chậm của Servo
D1 số xung phát ra, quyết định tọa độ của góc quay Servo
Y000 là ngõ ra tốc độ cao.
2_ PLSR D10 D11 K100 Y000
D10 là tấn số xung
D11 số xung
K100 thời gian tăng giảm tốc, đơn vị là ms
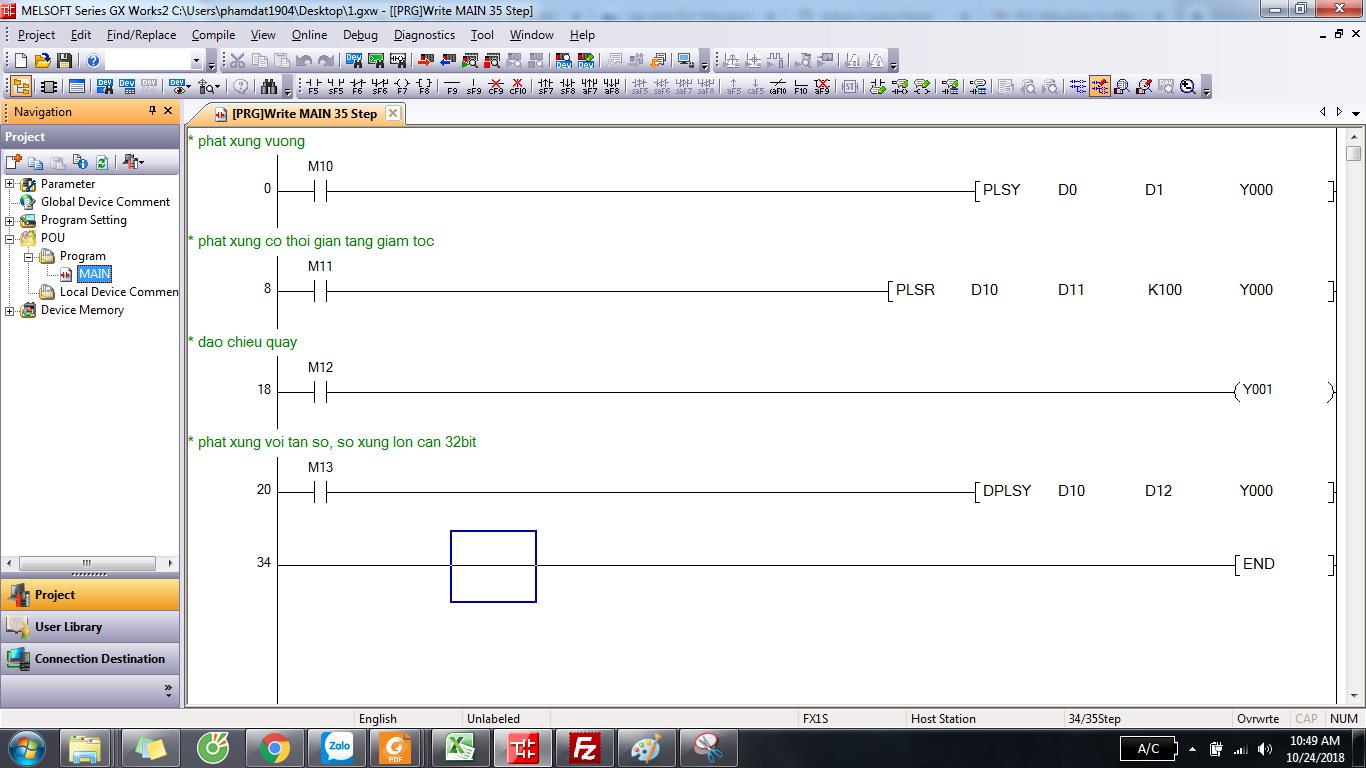
Hình 6 : Chế độ 32 bit
Như vậy ta đã hoàn thành điều khiển kết nối cơ bản nhất của điều khiển Servo.
Mọi thắc mắc liên hệ kĩ thuật để được giải đáp.
---------------------------------------------------------------------------------------
---------------------------------------------------------------------------------------
CÔNG TY TNHH HỆ THỐNG ĐIỆN - TỰ ĐỘNG HÓA FULL ELECTRIC